Open positions
The current opportunities are listed below. If you are interested in potential collaborations, feel free to get in touch.
| Image | Title | Type of position | Short abstract |
|---|---|---|---|
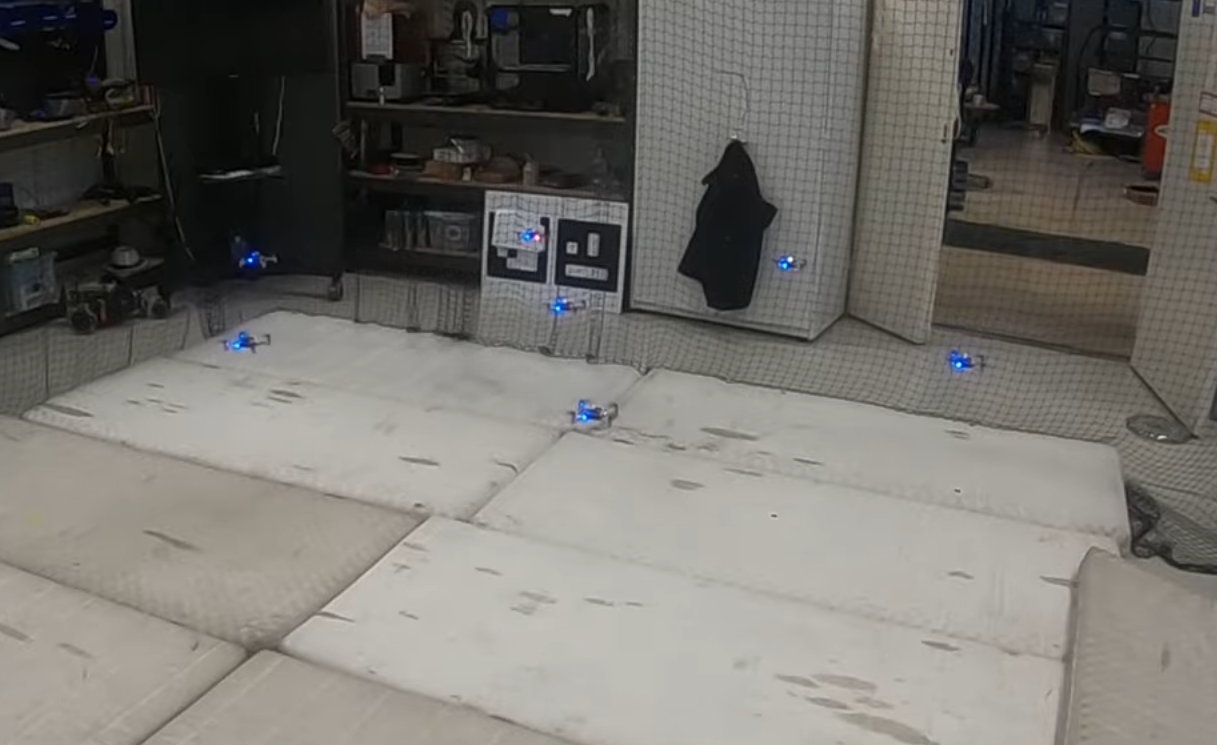 | Experimental Implementation of Open Multi-Agent Systems with Crazyflie UAVs | Master thesis | This thesis will experimentally validate open multi-agent coordination strategies on Crazyflie UAVs, bridging the gap between theory and practice in formation control, connectivity maintenance, and safety constraints when the number of robots is not fixed but changes dynamically. |
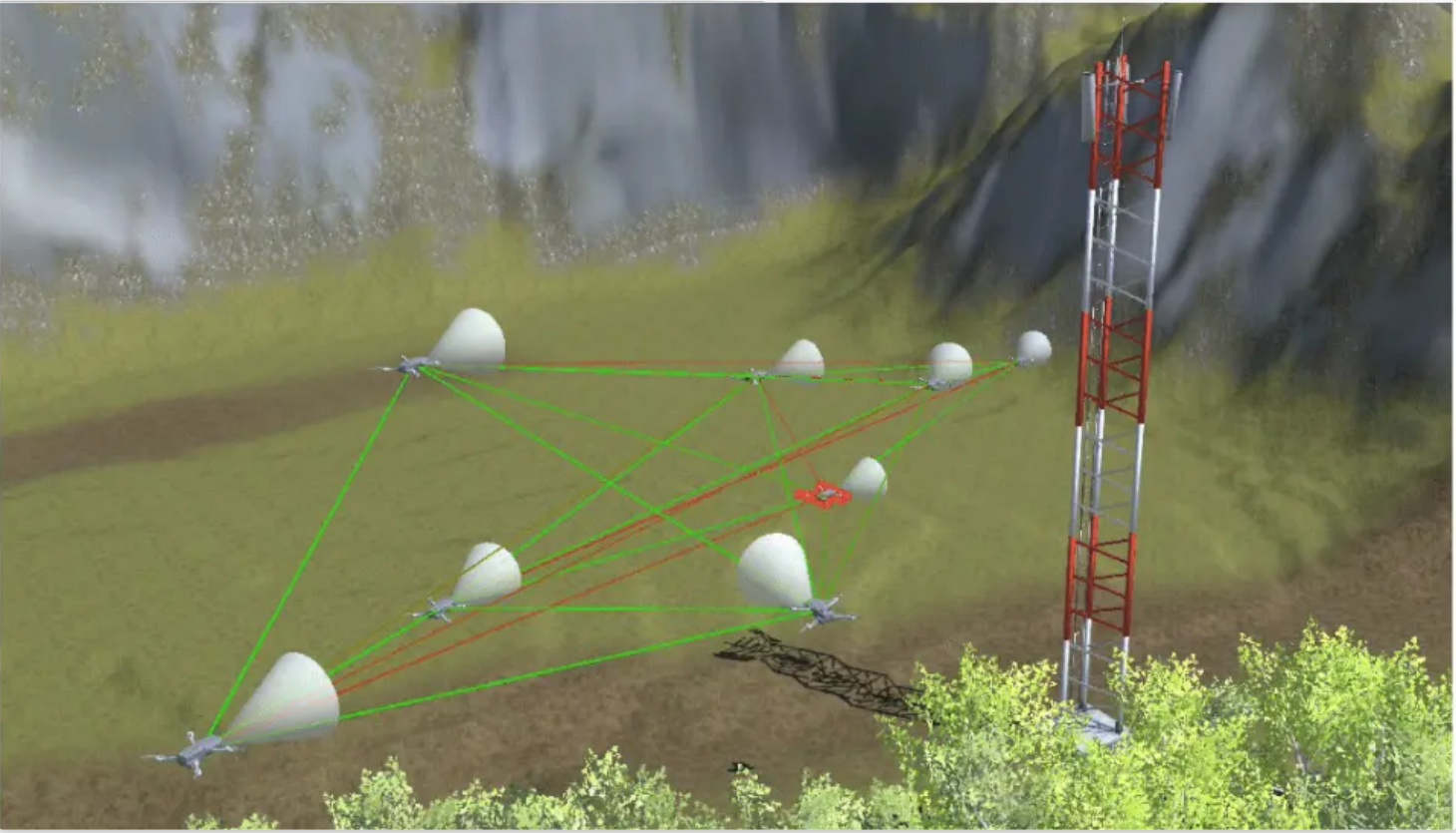 | Resilient Coordination of Multi-robot Systems — Enabling Long-Term Autonomy | Master thesis | This thesis proposes a distributed Control Barrier Function (CBF) strategy to enable persistent autonomy in open multi-robot systems. The framework guarantees safety and biconnectivity during dynamic agent addition and removal, facilitating long-term missions that outlast individual battery lives. Hosted by the Rainbow team, IRISA/Inria Rennes. |
 | Experimental Evaluation of Vision-Based Formation Control for Underwater Robots | Master thesis | This thesis implements and experimentally validates a vision-based formation control strategy for BlueROV2 underwater robots, using RGBD cameras as feedback for relative positions. Barrier Lyapunov Functions guarantee collision avoidance, connectivity maintenance, and convergence to a desired formation without inter-robot communication. |